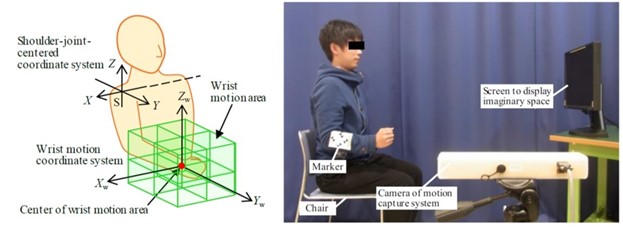
Masaharu KOMORI*, Takayuki UCHIDA, Koji KOBAYASHI and Tatsuki TASHIRO, Operating method of three-dimensional positioning device using moving characteristics of human arm, Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.1 Vol.12, (Released on J-STAGE January 19, 2018), (18 pages).
Masaharu Komori*, Shoun Nishioka, Yuya Suematsu, Recognition Accuracy of the Vehicle Posture and the Operator’s Face Posture When Operating a Small Vehicle, 2024 Joint 13th International Conference on Soft Computing and Intelligent Systems and 25th International Symposium on Advanced Intelligent Systems (SCIS&ISIS), 2024-11-11, M-1-D-1.
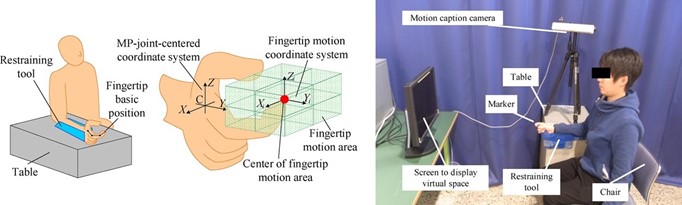
Masaharu Komori*, Koji Kobayashi, Tatsuki Tashiro, Method of position command generation by index finger motion to mitigate influence of unintentional finger movements during operation, Precision Engineering, Volume 53(2018-07), 96-106, 2018-03-09 (Available online).
Qiang Yao, Tatsuro Terakawa*, Masaharu Komori, Hirotaka Fujita, and Ikko Yasuda, Effect of Viewpoint Change on Robot Hand Operation by Gesture- and Button-Based Methods, Journal of Robotics and Mechatronics, No.6 Vol.34, (December 20, 2022), 1411-1423.