Qiang YAO, Tatsuro TERAKAWA*, Yuya MORITA, and Masaharu KOMORI, Mobile parallel manipulator consisting of two nonholonomic carts and their path planning, Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.2 Vol.17, (Released on J-STAGE January 26, 2023), (19 pages).
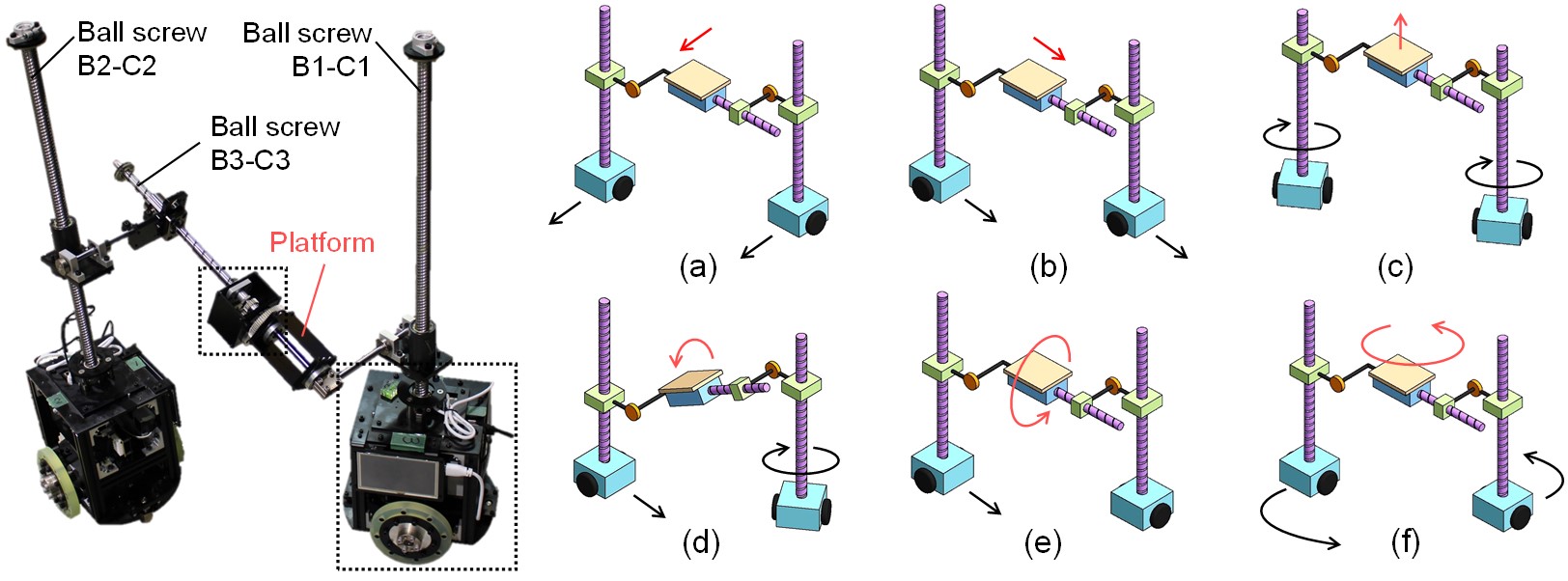
Siying LONG, Tatsuro TERAKAWA* and Masaharu KOMORI, Type synthesis of 6-DOF mobile parallel link mechanisms based on screw theory, Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.1 Vol.16, (Released on J-STAGE January 1, 2022), (19 pages).
SWOM (Slidable-Wheeled Omnidirectional Mobile Robot)
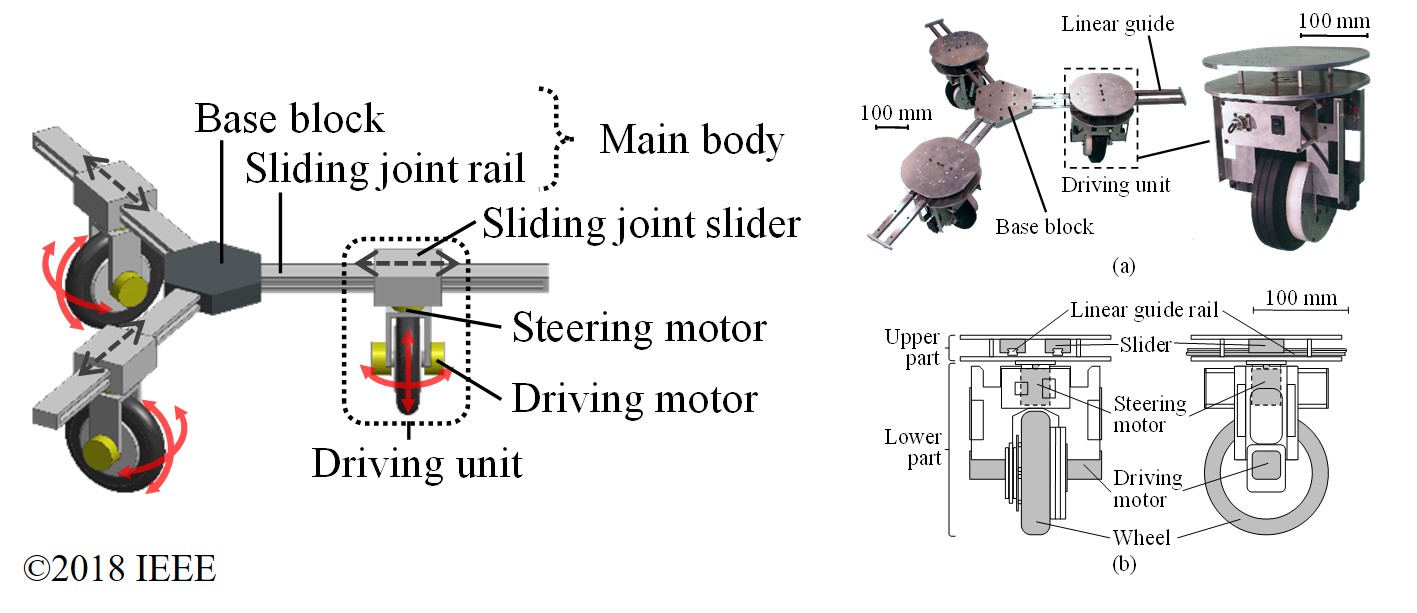
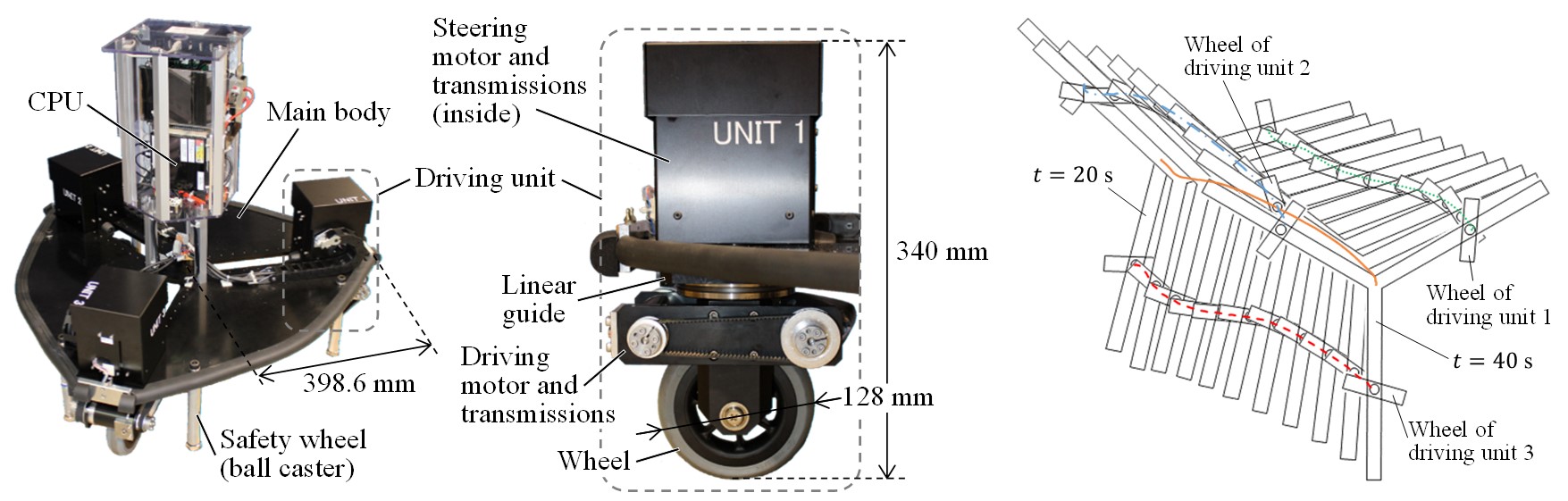
Tatsuro TERAKAWA, Masaharu KOMORI* and Kenji FUJIMOTO, Control of an omnidirectional mobile robot with wheels connected by passive sliding joints, Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.1 Vol.13, (Released on J-STAGE January 10, 2019), (13 pages).
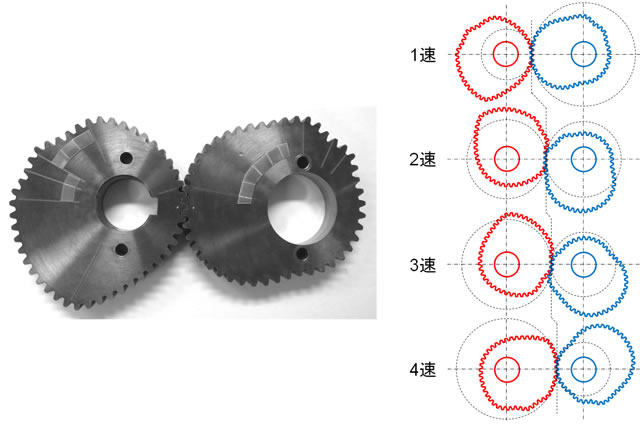
駆動力抜けのない変速システムと電気自動車EVUT (Electric Vehicle with Uninterrupted Transmission)