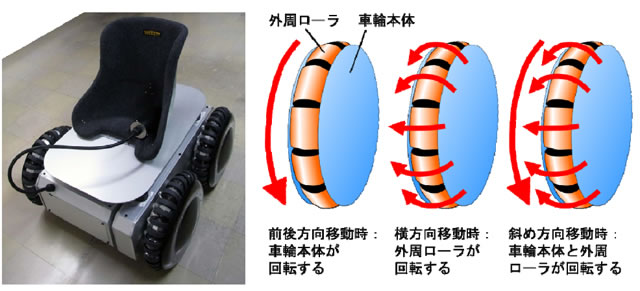
Masaharu KOMORI*, Kippei MATSUDA, Tatsuro TERAKAWA, Fumi TAKEOKA, Hideaki NISHIHARA, Hiroo OHASHI, Active omni wheel capable of active motion in arbitrary direction and omnidirectional vehicle, Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.6 Vol.10, (Released on J-STAGE October 24, 2016), (20 pages).
Tatsuro TERAKAWA, Masaharu KOMORI*, Mitsuru SAKAMOTO, Yuji KAWATO, Yuya MORITA and Yugo NISHIDA, Two-wheel-drive Vehicle That Is Movable in the Longitudinal and Lateral Directions with a Small Number of Motors, JOURNAL OF JAPAN SOCIETY FOR DESIGN ENGINEERING, Vol.54, No.2, (Advance publication date:29 October 2018), pp.145–160.
Masaharu KOMORI, Tatsuro TERAKAWA*, Taichi INOUE and Mitsuki MORIMOTO, Characteristics of human center of pressure shifts in forward-backward, left-right, and oblique directions in standing posture and their effect on mobile device manipulation, Mechanical Engineering Journal, Vol.12, No.1, (Advance online publication: 2025/01/09), (Available on J-STAGE: 2025/02/15), (24-00245) , (16 pages).
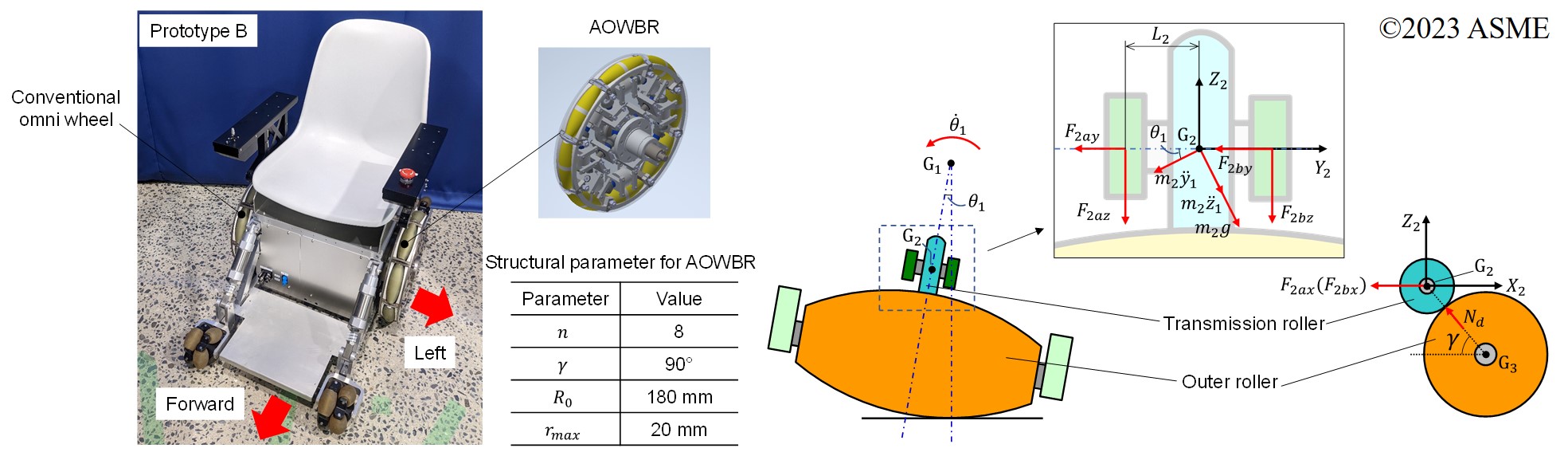
Siying Long, Tatsuro Terakawa*, Mahiro Yogou, Rintaro Koyano, Masaharu Komori, Kinetic Analysis of Active Omni Wheel With Barrel-Shaped Rollers for Avoiding Slippage and Vibration, Journal of Mechanisms and Robotics, Volume 16, Issue 5, (Published Online: June 9, 2023), (051002) (11 pages).
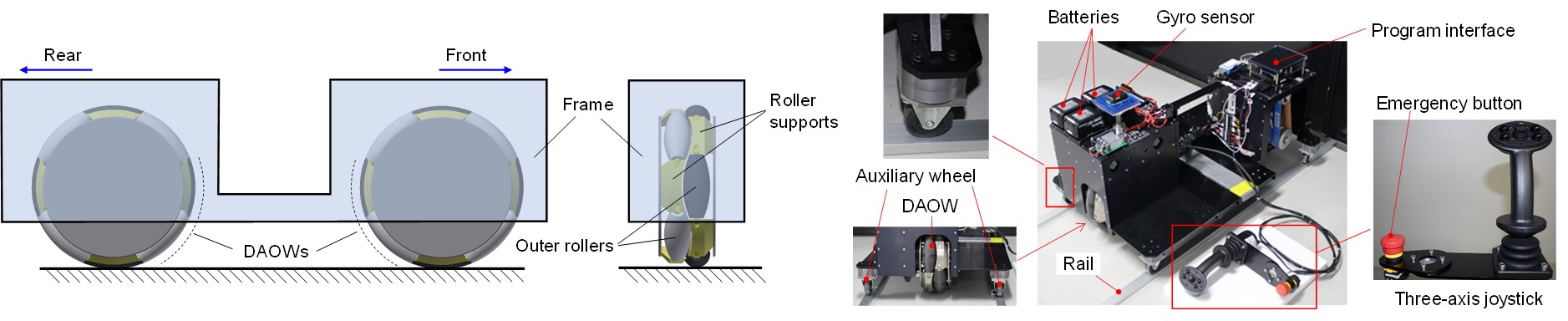
Siying Long, Tatsuro Terakawa*, Masaharu Komori, Yugo Nishida, Takumi Ougino, Yusuke, Hattori, Effect of double-row active omni wheel on stability of single-track vehicle in roll direction, Mechanism and Machine Theory, Volume 163 (September 2021)(Available online 14 May 2021), 104374.
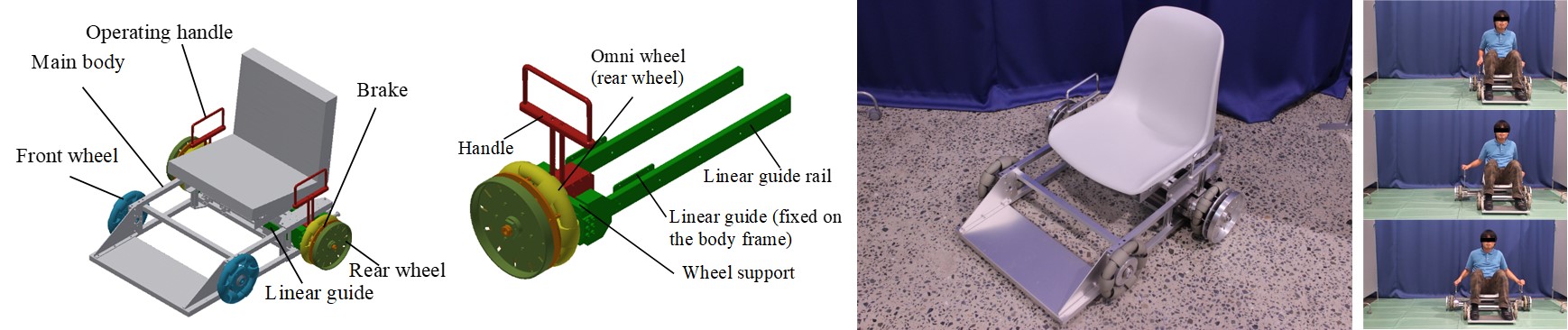
Hiroki KATO, Masaharu KOMORI and Tatsuro TERAKAWA*, Human-powered vehicle capable of movement in the longitudinal and lateral directions, Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.6 Vol.14, (Released on J-STAGE July 16, 2020), (16 pages).