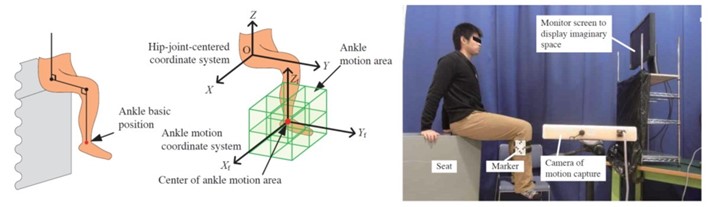
Masaharu Komori, Tatsuro Terakawa*, Ikko Yasuda, Experimental Investigation of Operability in Six-DOF Gesture-Based Operation Using a Lower Limb and Comparison With That in an Upper Limb, IEEE Access, Volume 8 (2020-06-17), 118262-118272.
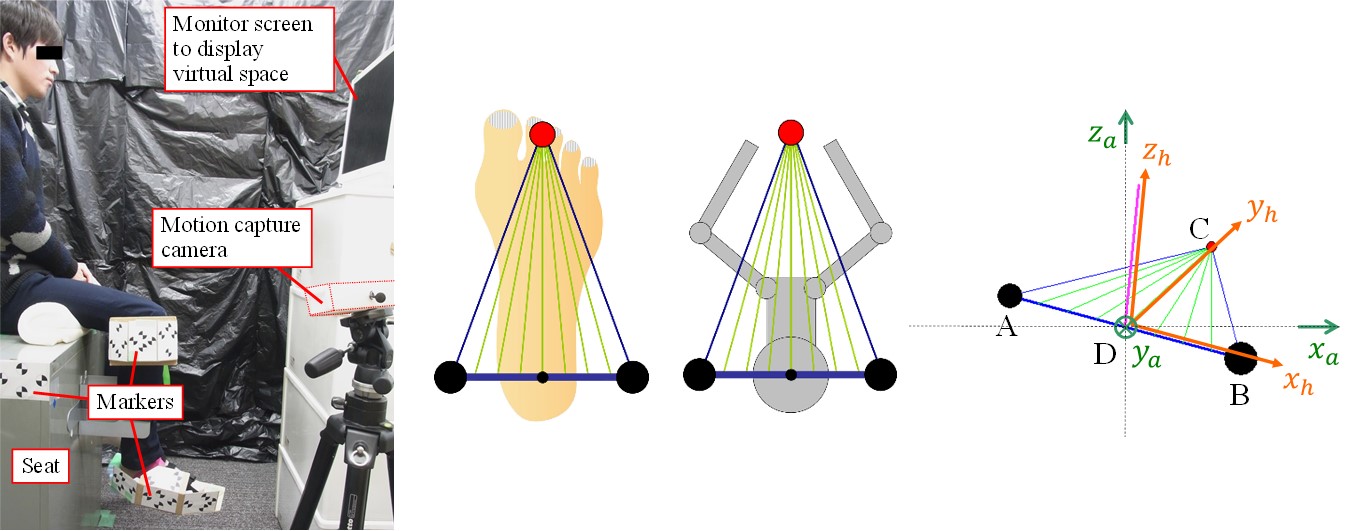
Qiang Yao, Masaharu Komori*, Tatsuro Terakawa, Riku Higashide, Toshiki Watanabe, Experimental evaluation of the flexion and extension movement characteristics of toes in a position operation task and a comparison with fingers, Precision Engineering, Volume 64(2020-07), 288-299, 2020-04-29 (Available online).
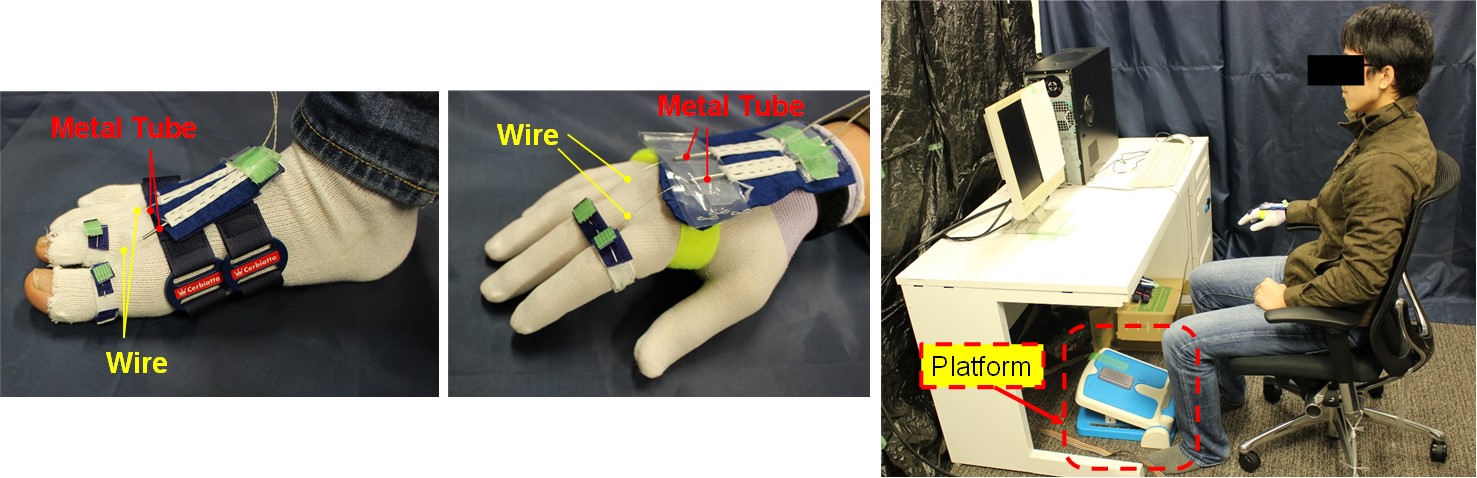
Hiroki Kato, Tatsuro Terakawa*, Masaharu Komori, Ikko Yasuda, Analysis of Effect of Motion Path on Leg Muscle Load and Evaluation of Device to Support Leg Motion During Robot Operation by Reducing Muscle Load, IEEE Access, Volume 9 (2021-03-17), 45104-45122.