Research
前後左右に移動可能な省モータ2輪駆動型移動装置
前後左右に移動可能な省モータ2輪駆動型移動装置 KUISVHE クイスビー
書誌情報
- Tatsuro Terakawa, Masaharu Komori, Mitsuru Sakamoto, Yuji Kawato, Yuya Morita, and Yugo Nishida, “Two-wheel-drive Vehicle That Is Movable in the Longitudinal and Lateral Directions with a Small Number of Motors,” Journal of Japan Society for Design Engineering, Vol.54, No. 2, pp. 145-160, 2019.
駆動力抜けのない変速システムを搭載した電気自動車EVUT(Electric Vehicle with Uninterrupted Transmission)
解説はこちら
小歯数差歯車機構を用いた減速機構内蔵モータ
小歯数差歯車機構を用いた減速機構内蔵モータ SIMENMOTOR サイメンモータ
書誌情報
- 寺川達郎,小森雅晴,森田悠也,波動歯車装置の原理を利用した減速機構内蔵モータ,設計工学, Vol.52, No. 11, pp. 683-694, 2017.
- Tatsuro Terakawa, Masaharu Komori, Shouta Tamura, Ryo Kataoka, and Yuya Morita, “Reducer-integrated motor using simultaneous engagement of gear pairs with small and no differences in teeth number,” Journal of Advanced Mechanical Design, Systems, and Manufacturing, Vol. 12, No. 1, 2018.
HENMEC Reducer ヘンメック減速機
真横にも、どの方向にも移動できる!未来型の乗り物を開発-全方向駆動車輪で移動を便利に簡単に-
2012年3月22日
小森雅晴 工学研究科准教授(機械理工学専攻)は、真横にも、どの方向にも移動できる、未来型の乗り物Permoveh (Personal Mobile Vehicle)を開発しました。
今回開発した一人用の乗り物Permovehは、前後・左右・斜めのどの方向にも移動可能な全方向駆動車輪を用いることにより、前後だけでなく真横にも斜めにも移動することができ、また、その場で回転して向きを変えることができる特徴を有しています。これにより、従来の車いすや高齢者用移動装置では苦労することが多かった、病室やオフィス、エレベータなどの狭いスペースでの移動が簡単になります。また、人と同じようにどの方向にも移動でき、向きを変えることができることから、周囲の人と調和して移動できるパーソナルモビリティとして利用することができます。さらに、この技術は工場や倉庫で用いる移動車両や搬送車、コンベアなどに応用可能と考えられます。
背景
一人用の移動装置であるパーソナルモビリティへのニーズが高まっています。特に、高齢者や足の不自由な方にとっては、一人乗りの移動装置が生活の中で重要な役割を果たしています。現在、一人用の移動装置として車いすや高齢者用電動移動装置などが販売されていますが、これらの移動装置は前後移動や向きを変えながら斜め方向に移動することは可能ではあるものの、真横に移動することはできません。病室でベッドのすぐそばに移動したいときや、オフィスにおいて机に向かったまま横に移動したいとき、あるいは、混雑したエレベータ内での移動など、真横に移動したい場面は日常生活の中に多く存在しています。しかしながら、従来の移動装置では直接には真横に移動できないため、真横に移動するためには、前後・斜めの移動を繰り返しながら徐々に横に移動する「切り返し作業」が必要でした。このため、病室やオフィスなどの狭い空間内では移動に苦労することが多くありました。また、「切り返し作業」をするためのスペースを余分に確保しておくことも必要でした。このため、真横に移動可能な一人乗りの乗り物が必要とされていました(※)。
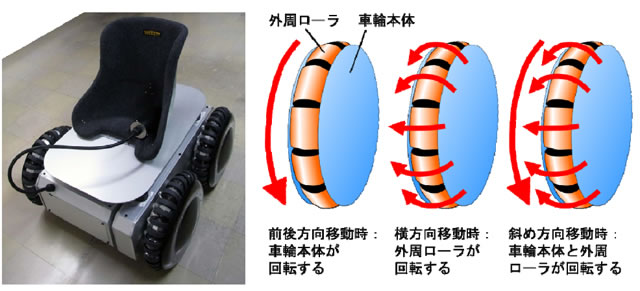
(※)外周ローラが自由回転する車輪を用いることで真横移動を可能にする移動装置が従来より開発されていますが、外周ローラの回転の不確実性のため、安定した移動が困難であるという問題がありました。
研究の概要
小森准教授は、図1右側に示すように、車輪本体と車輪の外周部に配置された外周ローラをそれぞれ別々に駆動し回転させることが可能な全方向駆動車輪を開発しました。全方向駆動車輪は車輪本体が回転すると前後方向に、外周ローラが回転すると横方向に、車輪本体と外周ローラがともに回転すると斜め方向に移動します。この全方向駆動車輪を用いることで、前後だけでなく真横にも斜めにも移動することができ、その場で回転して向きを変えることも可能な一人用の乗り物Permovehの開発に成功しました。
(1)周囲の人と同じように移動でき、狭い空間でも簡単に移動できる
現在の一人用移動装置では真横の移動ができないため、病室やオフィスなどの狭い空間内での移動の際に苦労することが多くありました。今回開発した乗り物Permovehは、真横への移動が可能であるとともに、斜めへの移動も、その場で回転して向きを変えることも可能です。このため、狭い空間内でも任意の方向への移動を容易にできます。また、人と同じように、どの方向にも移動でき、どの方向にも向きを変えることができることから、周囲の人と調和して移動できる一人用の移動装置であるパーソナルモビリティとして利用することができます。
(2)任意の方向への素早い移動が可能
開発した乗り物Permovehの任意の方向に移動できる機能は産業分野への応用も可能です。工場や倉庫では無人搬送車やフォークリフトなどの搬送車両が多く用いられていますが、これらが真横に移動することができれば、切り返し作業のために余分なスペースを確保する必要がなくなり、空いたスペースを有効利用できるようになります。また、切り返し作業をすることなく、直接に真横に移動することができるため、運搬作業時間の短縮が可能であり、生産現場の効率化に貢献すると期待できます。さらに、全方向駆動車輪はコンベアと組み合わせて用いることで、物品の選別作業が可能となります。
変速時の駆動力抜けのない変速システムを開発-従来の電気自動車に比べ10%走行距離向上へ-
2013年12月16日
小森雅晴 工学研究科准教授は、NEDOの若手研究グラント(産業技術研究助成事業)の一環として、変速時に駆動力抜けのない変速システムを開発しました。
新開発の変速システムは、減速比を滑らかに変化させることができる非円形歯車を採用しており、変速中でも駆動力を伝えることが可能となります。この変速システムを電気自動車に搭載した場合、通常の走行性能の向上に加え、走行時の電力消費量も軽減でき、従来の変速機非搭載の電気自動車と比較して、10%程度の走行距離延長効果が期待できます。
本プロジェクトにおいては、同変速システムを実際に実験用車両に搭載しました。本学では、電気自動車EVUT(Electric Vehicle with Uninterrupted Transmission)として、今後さまざまな実証実験を行います。(図1)

背景
地球温暖化防止のため、走行時に二酸化炭素を排出しない電気自動車に期待が寄せられています。しかしながら、電気自動車は1回の充電で可能な走行距離が短く、このことが普及の障害となっています。モータは高効率で運転できる回転速度とトルクの領域が限られています。変速機を用いて理想的な変速を行えば、モータを小型化できるとともに、モータの高効率な領域を有効に利用できるようになるため、乗用車の市街地走行を想定した場合、電力消費を約10%低減することができるとのシミュレーション結果が報告されており、それにより、走行距離を伸ばすことが可能となります。
しかしながら、変速機を用いると速度に応じて変速機内の歯車対を切り替える変速作業が必要となります。変速作業中はモータからタイヤに駆動力が伝わらないため、加速をしたい状況にもかかわらず速度が低下するとともに、体が前後に揺すられることから、運転者や搭乗者に不快感やストレスを与えます。また、加速をしたい状況にもかかわらず速度低下を生じるため、運転者は変速後に余分にアクセルペダルを踏み込む必要があり、このことが電力消費の改善効果を低下させます。無段変速機CVTを用いれば変速時の駆動力抜けは生じませんが、CVTは伝達効率が悪いため、電力消費の改善効果は限定的です。このようなデメリットがあるため、現在の電気自動車には一般に変速機が搭載されていません。すなわち、電気自動車では、変速時に駆動力が抜けず、かつ、効率の良い変速機が要求されます。
一方、変速機の駆動力抜けの問題は、一般的な乗用車・トラック・バスなどの従来型エンジン搭載車でも、加速時の燃費の悪化、加速性能の低下、不快感などを生じるため、課題となっています。
研究成果の特徴
本プロジェクトでは、駆動力抜けの無い新しい変速システムを開発しました。通常の変速機では歯車対の切り替えを行う際に動力源と駆動輪の間のトルク伝達を一度切断する必要があります。本技術では、そのタイミングにおいて、非円形歯車によって駆動力を伝達します。非円形歯車は減速比を滑らかに変化させることができる形状をしており、切り替えを行う二組の歯車対の中間的な状況を作り出し、変速中でも駆動力を伝えることができます。これにより、変速の際に速度が低下することを防ぎます。スムーズに走行するため、変速後に余分な加速が必要なく、またCVTとは異なり歯車によって駆動力を伝達するため、高効率を実現可能です。
(1)電気自動車に適した変速システムにより走行距離を伸ばし、電気自動車の普及に貢献
非円形歯車の幾何学的特性の解明、本変速システムの設計法の構築、高速回転条件下での変速法の開発などの車両に搭載するために必要となる技術を開発したことにより、本変速システムを実現しました。
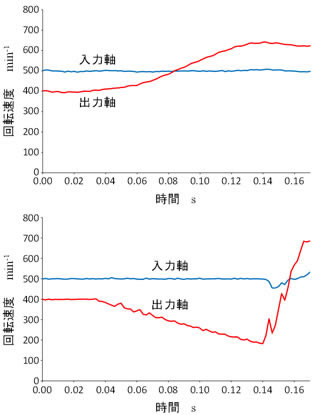
図2は、開発した変速システムと従来型の変速機について、テストベンチにおいて動作を確認した実験結果です。これらは入力軸(モータ側)の回転速度を一定に保ちながら変速した場合です。図2の上の図では非円形歯車を使用した変速システムにより、時刻0.03秒付近から0.13秒付近の間に、スムーズに1速から2速に相当する状態まで変化しています。それに対して、下の図は従来型の変速機を模擬したもので、0.03秒付近から0.13秒付近までの間、入力軸(モータ側)と出力軸(駆動輪側)が連動せず、駆動力が伝わらない状況が発生しています。その結果、摩擦抵抗によって徐々に出力軸の回転速度が低下し、2速に切り替えたときに急激な回転速度変化、すなわち変速ショックが見られます。
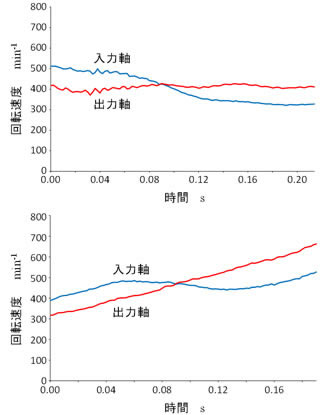
図3は、開発した変速システムを用いて、出力軸の回転速度が一定となるように制御した場合(上)、および出力軸の回転加速度が一定となるように制御した場合(下)の実験結果です。このように変速作業中に出力軸の回転状態を意のままに制御することはこれまでの変速機では不可能でした。
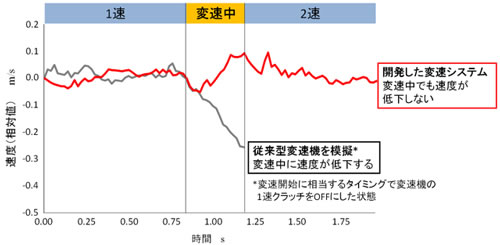
開発した変速システムを搭載した、市販の1人乗り小型電気自動車(ENAX-S3)をベースにした試作車(図1)によって行った変速実験の結果が図4です。横軸は時間、縦軸は計測された速度であり、灰色で示した従来型変速機を模擬した実験の際には変速中に速度低下しているのに対し、開発した変速システムにおいてはそのような速度低下がなく、意図したとおりの効果が得られることを確認しました。このような変速システムによれば、電気自動車に変速機を搭載するメリットである電力消費低減効果をより向上させることが可能となります。また、変速の際に速度低下がなく、スムーズで快適な走行が可能です。このことは電気自動車の普及につながり、二酸化炭素排出量の低減に貢献します。
また、一般に電気自動車に変速機を用いることで出力可能なトルクや速度が大きくできるため、加速性能を高める効果が得られますが、変速中に駆動力抜けのない本変速システムではより高い加速性能が得られます。さらに、より小型のモータでも高い加速性能を実現することが可能となり、モータの小型化、軽量化につながります。
(2)エンジン搭載車用の多段変速システムの実現
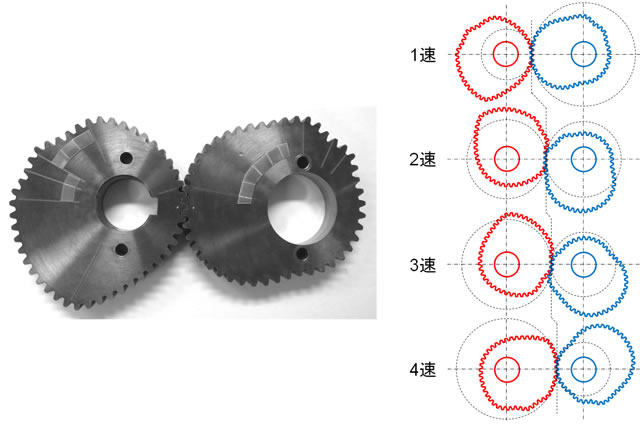
電気自動車は2段の変速で十分と考えられますが、乗用車・トラック・バスなどのエンジンを搭載した自動車では、通常、多段の変速機が使用されます。本研究では多段変速用の非円形歯車を提案し、それを用いた4段変速システムを構築し、変速中に駆動力抜けがない多段変速を実現しました。これによりエンジン搭載車についても、加速時の燃費の向上とともに加速性能の向上が可能となります。また、変速時の速度低下による運転者、搭乗者の不快感の解消につながります(図5)。
(3)出力軸の回転を正確に制御することが可能
従来の変速機は、変速の際に入力軸から出力軸に回転が伝達されないため、変速の際に出力軸の回転を正確に制御することは困難でした。本変速システムでは図3に示したように、変速の際にも非円形歯車が回転を正確に伝えるため、出力軸の回転を正確に制御することが可能となります。本研究では、変速中でも狙い通りに出力軸回転速度を制御する理論を構築し、実験により、本変速システムが速度一定での変速、加速度一定での変速などを実現可能であることを確認しました。スムーズな変速により、精密位置決めなどが要求されるロボットなどの分野でも利用が期待できます。
今後の展開
今後は、実用化に向けた研究を進めていく予定です。すでに、市販の自動車用変速機で使用されている歯車やクラッチを用いた本変速システムを構築し、変速実験に成功しています。
注釈
電気自動車に変速機を搭載することで、モータの小型化とモータの効率的な活用が可能になることから、電力消費の抑制が期待出来ます。しかし、通常の変速機では変速作業の間はモータからタイヤに駆動力が伝わらず速度が低下し、変速後に余分な加速が必要となり、電力消費抑制効果が低下します。無段変速機CVTを用いれば変速時の駆動力抜けは発生しないものの、伝達効率の悪さがネックとなり、電力消費の改善効果は限定的です。このように十分なメリットが得られないため、電気自動車では一般に変速機は採用されていません。
書誌情報
掲載誌
- Journal of Advanced Mechanical Design, Systems, and Manufacturing, No.7 Vol.6, 1281-1297, 2012.
- 日本機械学会論文集(C編)77巻782号、2011年、pp.3871-3880.
論文タイトル
- “Control Method for Output Speed during Velocity Ratio Change under High Rotational Speed Using an Uninterrupted Transmission System”
- 「常時動力運動伝達可能な多段変速システム」
著者
- Jungchul KANG, Masaharu KOMORI, Shuai ZHANG and Koki SUGIYAMA
- 姜晶哲、小森雅晴、竹岡郁、小野寺祐治
新聞
- 朝日新聞(12月17日 31面)、京都新聞(12月17日 22面)、産経新聞(12月17日 30面)、中日新聞(1月26日滋賀版 23面)、日刊工業新聞(12月17日 19面)、日本経済新聞(12月17日 16面)および毎日新聞(12月17日 8面)に掲載されました。
